Shreehan
Santosh Kate
Control Theory, Optimization, Learning.
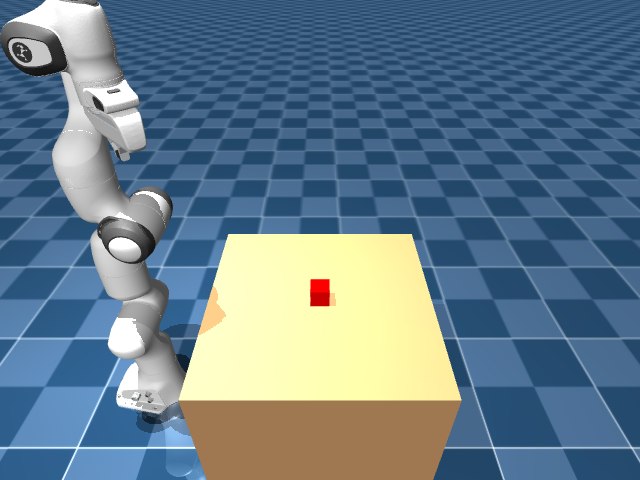
I work on the kinematics, dynamics, and control of robotic manipulators and aerial systems, from link length optimization of redundant arms to compliant manipulation on the Franka Emika Panda. I'm graduating from NIT Tiruchirappalli and heading into a Master's in Robotics Engineering at WPI, working toward a PhD in manipulation and whole body control.
Worked & studied with